ГлавнаяКаталогПозиционеры. Трансляторы. Юстировка волокон и ФИСОптоволоконные позиционеры. Стыковка волокна и фотонных схемПрецизионные ручные позиционеры для оптоволокна и фотонных схемRYP3000 - ручной трехосевой транслятор для микропозиционирования
RYP3000 - ручной трехосевой транслятор для микропозиционирования
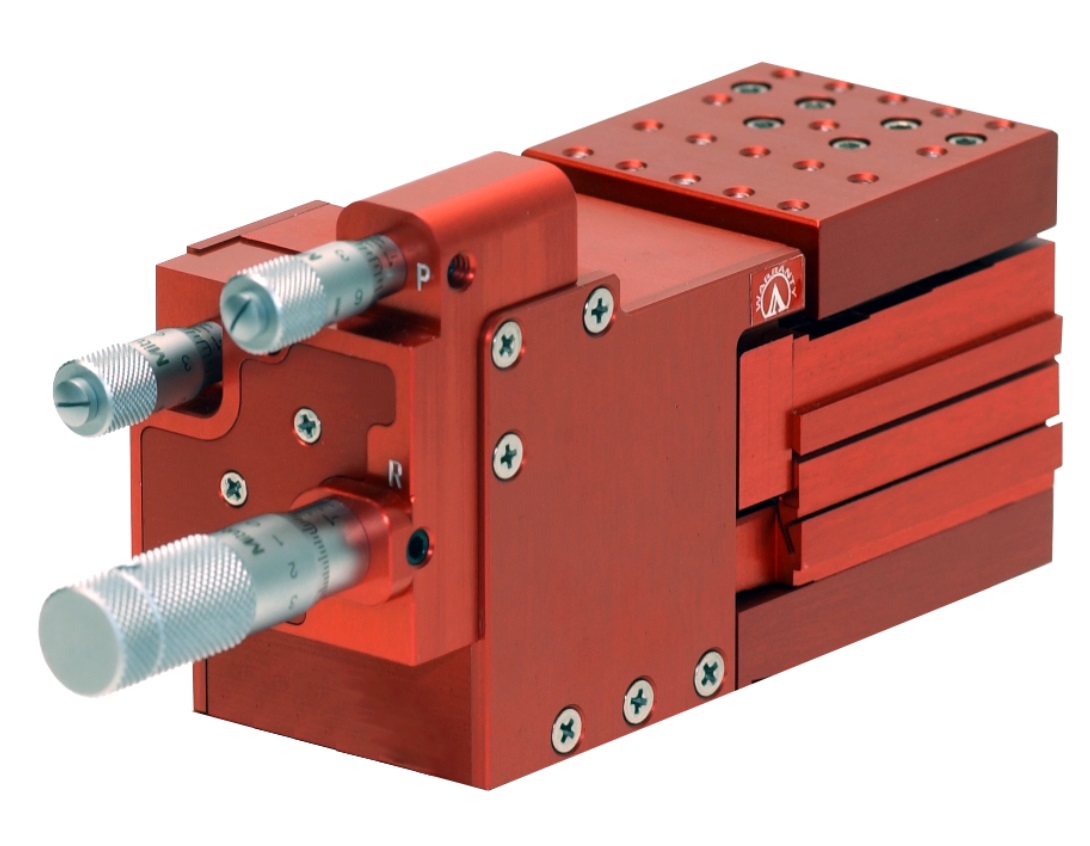
RYP3000 - серия высокоточных ручных трехосевых систем вращения. Отличается превосходным разрешением, простотой использования. Каждая ось вращения обеспечивает ход 3 градуса.
- Диапазон поворота относительно трех осей (yaw, pitch, roll) ±1,5 град.
- Разрешение по оси (roll) 0,1 арксек.
- Разрешение по осям (yaw, pitch) 0,2 арксек.
Производитель: LUMINOS
RYP3000 - серия высокоточных ручных трехосевых систем вращения. Отличается превосходным разрешением, простотой использования. Позиционер основан на изгибе, не имеет подшипников. Каждая ось вращения обеспечивает ход 3 градуса. Запатентованная технология Ratio Drive обеспечивает высокое разрешение roll 0,2 арксек, yaw и pitch 0,4 арксек.
- Совмещенный центр вращения.
- Превосходное разрешение.
- Компактная конструкция.
- Демпфированная внешняя конструкция корпуса обеспечивает превосходную нечувствительность к вибрациям.
- Легкая алюминиевая конструкция позволяет легко перемещать систему с помощью другого оборудования.
- Высокая механическая жесткость обеспечивает прочную и стабильную систему основания.
- Вращение без угловых погрешностей.
| Параметр | Значение | Ед.измерения | ||
|---|---|---|---|---|
| Перемещение | ||||
| Перемещение актюатора | Перемещение платформы | |||
|
Ось вращения (roll)
|
±1,5 град |
±1,5 град | ||
|
Вертикальная ось (yaw)
|
±1,5 град |
±1,5 град | ||
|
Горизонтальная ось (pitch)
|
±1,5 град |
±1,5 град | ||
|
Разрешение
|
||||
| Разрешение | Перемещение |
|
||
|
Ось вращения (roll)
|
0,1 аксек | 10 арксек |
|
|
|
Вертикальная ось (yaw)
|
0,2 арксек |
30 арксек |
|
|
|
Горизонтальная ось (pitch)
|
0,2 арксек |
30 арксек |
|
|
|
Конфигурация и погрешность
|
||||
| Тип изгиба | Тип движения | Погрешность | ||
|
Ось вращения (roll)
|
одинарный | вращательное | 35 (макс.) | мкм |
|
Вертикальная ось (yaw)
|
двойной | вращательное | - | |
|
Горизонтальная ось (pitch)
|
двойной | вращательное | - | |
|
Линейная жесткость
|
||||
|
Z
|
270 | кН/м | ||
|
Y
|
120 | кН/м | ||
|
X
|
60 | кН/м | ||
|
Жесткость при кручении
|
||||
|
Z-roll
|
80 | Нм/рад | ||
|
Y-yaw
|
120 | Нм/рад | ||
|
X-pitch
|
150 | Нм/рад | ||
|
Максимальная нагрузка
|
||||
|
Статичная
|
1 | кг | ||
|
Мгновенная
|
4,5 | кг | ||
|
Физические параметры
|
||||
|
Материал
|
алюминий | |||
|
Вес
|
600 | г | ||
|
Размер
|
114,3х44,5х68,6 | мм | ||
- Стыковка волокон друг с другом.
- Стыковка волокон с микрочипами и другими электро-оптическими элементами.
- Позиционирование микроструктур в биологических задачах.
- Создание фотонных интегральных микросхем.








Мой заказ