HXP - моторизированные гексаподы




- Диапазон перемещения по осям X, Y до ±34 мм.
- Диапазон перемещения по оси Z до ±15 мм.
- Диапазон перемещения по θX, θY до ±11°.
- Диапазон перемещения по θZ до ±25°.
- Разрешение 0,25 мкм.
- Нагрузка до 20 кг.
- Скорость до 80 мм/с.
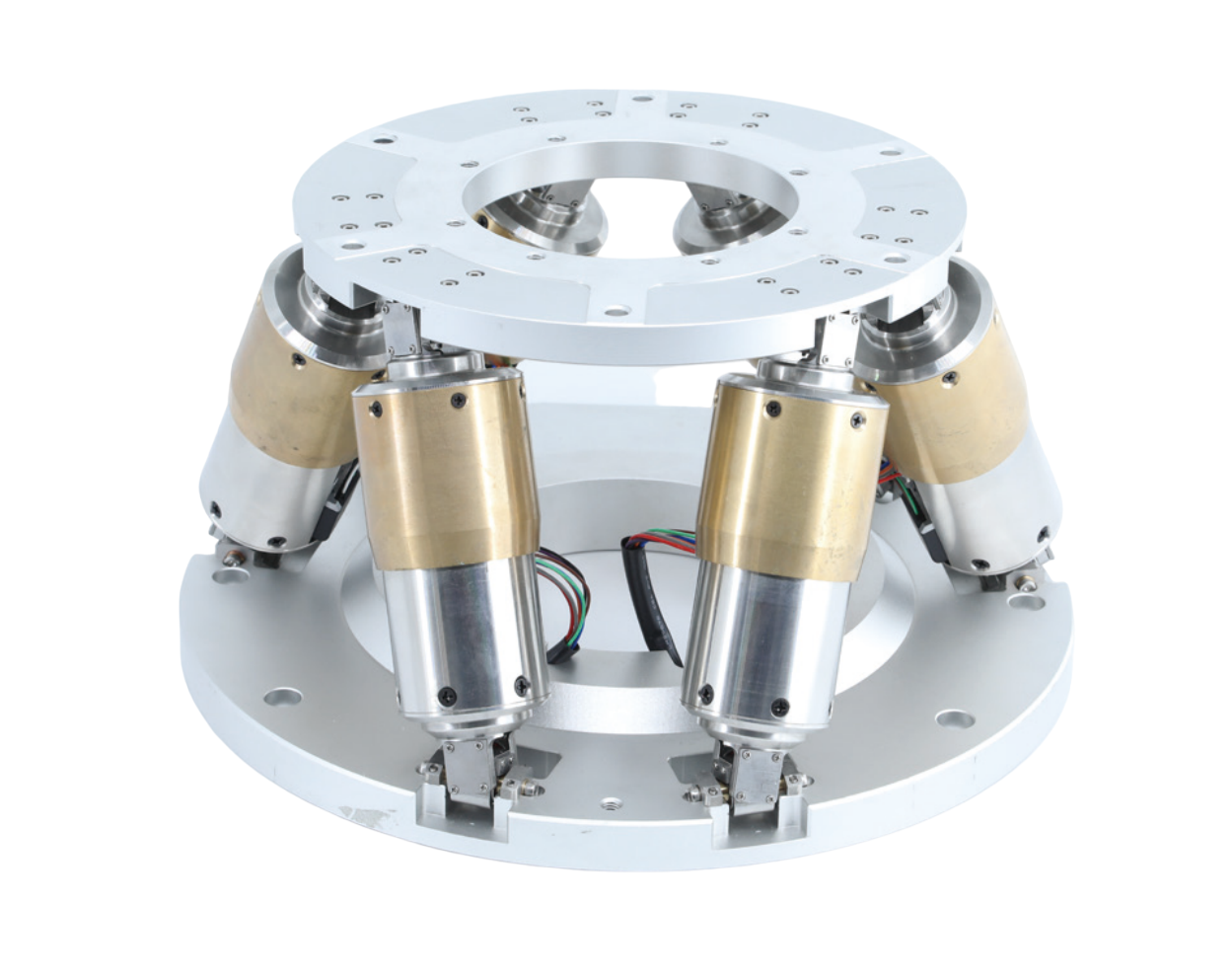
Серия моторизированных гексаподов HXP используется для высокоточной регулировки по шести направлениям и особенно подходит для точного пространственного выравнивания, обработки и сборки микроустройств, регулировки сердечника оптических устройств связи, контроля пластин и в других случаях.
Основной корпус состоит из шести толкателей и двойного крюкового соединения, которые обладают высокой жесткостью, высокой повторяемостью и могут быть установлены в любом положении. Доступны модели с абсолютным или инкрементальным энкодером. Толкающий двигатель с абсолютным энкодером способен сохранять информацию о местоположении после отключения питания и не нуждается в сбросе после повторного запуска. Система электропривода использует для связи стандартную промышленную шину EtherCAT, которая отличается высокой надежностью и эффективностью связи и совместима с основными системами управления движением.
Особенности:
- Система управления и программное обеспечение поддерживают различные форматы преобразования пространства угла Эйлера.
- Автоматическое управление системой координат рабочего пространства (включая настройку и преобразование мировой системы координат, системы координат заготовки (64 группы), автоматическую установку системы координат, автоматическую систему координат привода и автоматическую систему координат инструментов (64 группы)).
- Моделирование нагрузки.
- Автоматическая функция калибровки пространства.
- 3D-моделирование положения.
- Обучающая программа.
- Предоставляется дополнительный пакет разработки, который может быть интегрирован в системное оборудование в соответствии с фактическим применением.
| Параметр | Значение | Ед. измерения |
|---|---|---|
|
Модель
|
HXP-824A | |
|
Диапазон перемещения по осям X, Y*
|
±34 | мм |
|
Диапазон перемещения по оси Z*
|
±15 | мм |
|
Диапазон перемещения по θX, θY*
|
±11 | ° |
|
Диапазон перемещения по θZ*
|
±25 | ° |
|
Разрешение толкателя**
|
0,25 | мкм |
|
Минимальное поступательное движение X, Y, Z**
|
1 | мкм |
|
Минимальное поступательное движение θX, θY, θZ**
|
0,001 | ° |
|
Люфт X, Y**
|
3 | мкм |
|
Люфт Z**
|
1 | мкм |
|
Люфт θX, θY**
|
10 | " |
|
Люфт θZ**
|
15 | " |
|
Повторяемость X, Y**
|
±0,5 | мкм |
|
Повторяемость Z**
|
±0,3 | мкм |
|
Повторяемость θX, θY**
|
±2 | " |
|
Повторяемость θZ**
|
±2,5 | " |
|
Максимальная скорость толкателя
|
80 | мм/с |
|
Стандартная скорость толкателя
|
40 | мм/с |
|
Горизонтальная нагрузка
|
20 | кг |
|
Нагрузка в любом положении
|
2,5 | кг |
|
Тип двигателя
|
Шаговый серводвигатель | |
|
Рабочая температура
|
+10 - +40 | ℃ |
|
Материал корпуса
|
Нержавеющая сталь SUS / Алюминиевый сплав | |
|
Масса
|
7 | кг |
|
Длина кабеля
|
2 | м |
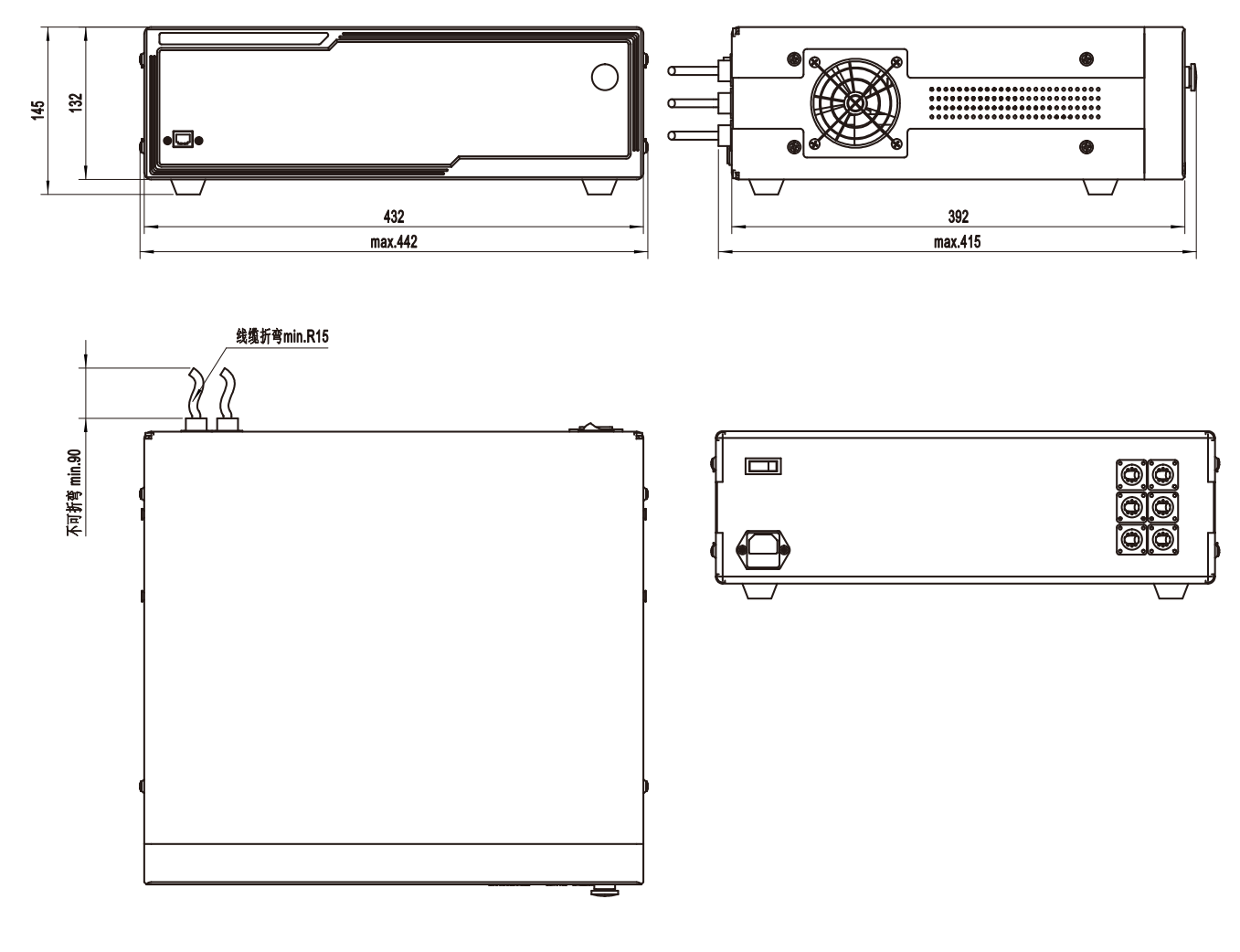
| Параметры контроллера | ||
|
Модель контроллера
|
TMC-NET-HXP | |
|
Номинальное напряжение
|
AC 220 | |
|
Номинальный ток
|
1,5 | |
|
Номинальная мощность
|
350 | |
| Рабочая температура | 0 - +55 | |
|
Тип каждой оси
|
EtherCAT/RTE X/6 дифференциальных импульсная осей |
|
|
Количество внутренних портов ввода-вывода
|
24 ввод и 12 вывод (с защитой от перегрузки по току и встроенным расширением) |
|
|
Количество AD/DA
|
2 канала АЦ, 2 канала ЦУ (0-10 В, встроенное расширение) |
|
|
Максимальное расширение AD/DA
|
256 АЦ, 128 ЦУ |
|
|
Количество импульсов
|
64 | |
|
Разрядность энкодера
|
64 | |
|
Разрядность ускорения
|
64 | |
|
Максимальная частота импульса
|
10 | МГц |
|
Количество датчиков перемещения на ось
|
4096 | |
|
Пространство массива
|
640000 | |
|
Интерфейс связи
|
Внешний: Ethernet RS232, RS485, Ethernet, USB, CAN, RTE X, EtherCAT |
|
| *Максимальное перемещение в пространстве | ||
| **Измеренное типичное значение | ||
- Научные исследования.
- Оптическая связь.
- Лазерные системы.
- Биомедицинские исследования.
- Сканирование поверхностей.
- Высокоточная фотоника.
- Высокоточное позиционирование в производственных сферах.
- Точное пространственное выравнивание.
- Обработка и сборка микроустройств.
- Регулировка сердечника оптических устройств связи.
- Контроль пластин.





