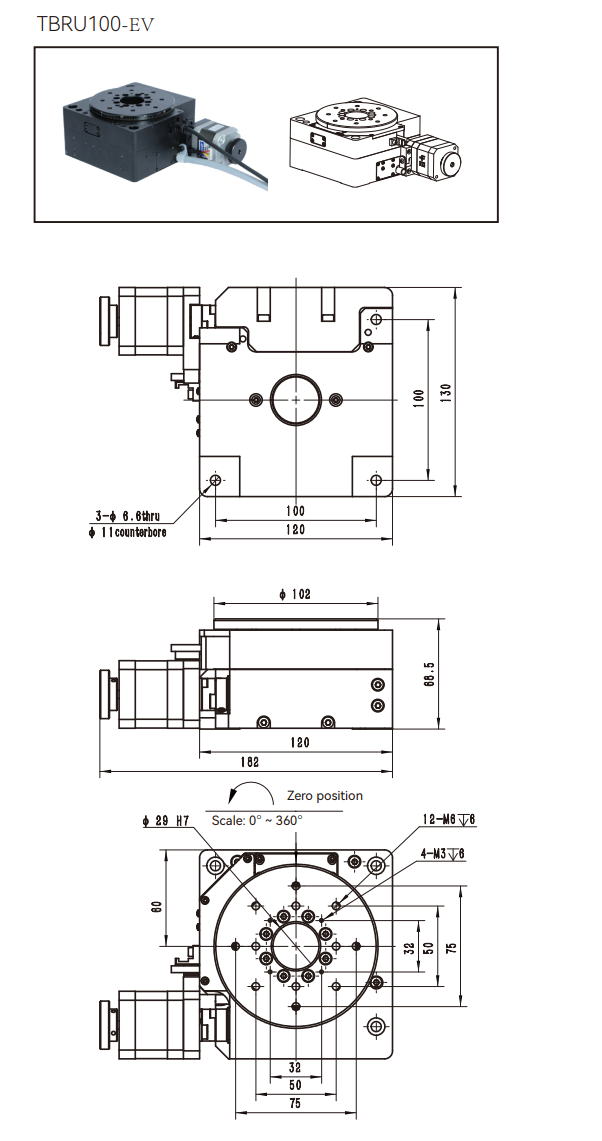
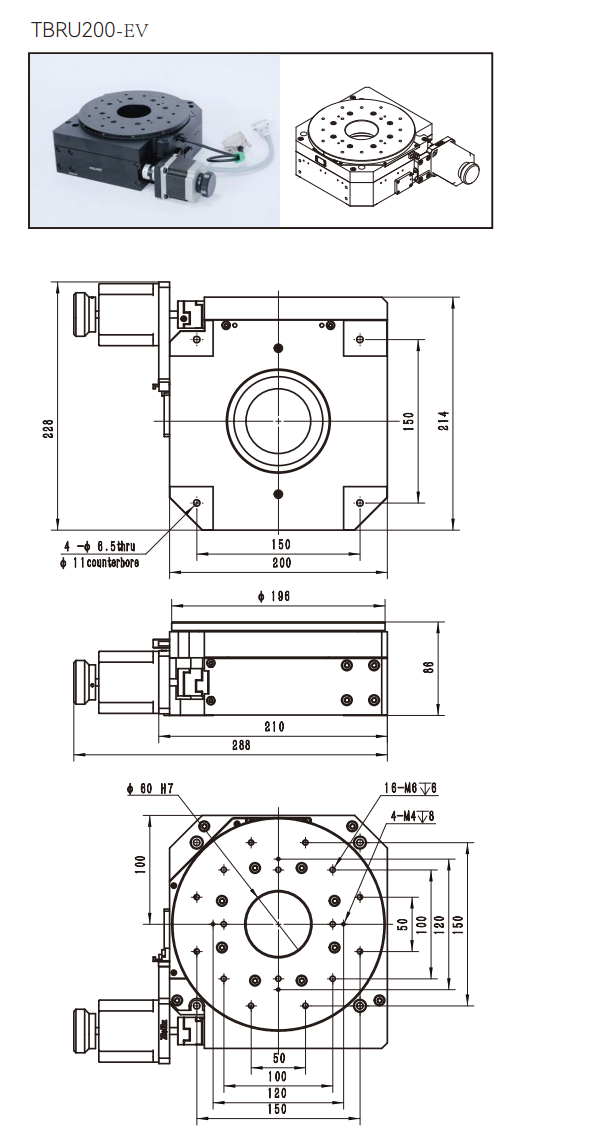
TBRU - моторизированные поворотные платформы






- Разрешение до 0,00125°.
- Нагрузка до 40 кг.
- Скорость до 20 °/с.
- Диаметр столика 102 или 196 мм.
Моторизированные поворотные платформы серии TBRU представляет собой высокоточную поворотную платформу с обратной связью, которая подходит для случаев, когда предъявляются высокие требования к регулировке угла наклона. Направляющий механизм оснащен кольцом с перекрестными роликами, в конструкции вала используется износостойкая червячная передача и винт, материал винта - закаленная нержавеющая сталь, высокая твердость, хорошая жесткость, материал червячной передачи - оловянная бронза, обладает выдающейся износостойкостью. Основной корпус изготовлен из черного анодированного алюминиевого сплава, который обеспечивает высокую точность вращения, осевое биение, концентричность и другие ключевые показатели. Уникальный механизм регулировки червячной передачи эффективно устраняет механические ошибки и обеспечивает высокую точность. Платформы серии TBRU обладают высокой грузоподъемностью и могут использоваться как в вертикальном, так и в перевернутом виде.
Особенности:
-
Усовершенствованная червячная передача обеспечивает высокую точность позиционирования.
-
Встроенная кольцевая разметка обеспечивает разрешение с обратной связью до 0,55 дюйма.
-
Направляющий механизм обеспечивают высокие характеристики перемещения и долговечности.
-
Двухфазный шаговый двигатель обеспечивает стабильную и надежную работу.
-
Встроенный датчик исходного положения упрощает эксплуатацию и настройку.
| Параметр | Значение | Ед.измерения | |||||
|---|---|---|---|---|---|---|---|
| Модель | TBRU100-EV |
TBRU200-EV |
|||||
|
Механические характеристики
|
|||||||
|
Размер столика
|
⌀102 |
⌀196 |
мм | ||||
|
Передаточное отношение
|
180:1 |
|
|||||
|
Направляющие
|
кольцо с перекрестными роликами |
||||||
|
Материал червячной передачи
|
износостойкая оловянная бронза |
||||||
|
Материал червячного винта
|
закаленная нержавеющая сталь |
||||||
|
Материал
|
черный анодированный алюминиевый сплав | ||||||
|
Масса
|
3,4 | 11,5 | кг | ||||
|
Муфта вала
|
20-5-5 | 25-6,35-6,35 | мм | ||||
|
Характеристики точности
|
|||||||
|
Разрешение (с обратной связью)
|
0,000152027 | 0,0000762712 |
° /pp |
||||
|
Разрешение без обратной связи 8 делений
|
0,00125 |
° |
|||||
|
Максимальная скорость*
|
20 | ° /с | |||||
|
Точность репозиционирования
|
≤ ±0,003 |
° |
|||||
|
Статический зазор
|
≤ 6 |
≤ 12 |
мкм | ||||
|
Люфт
|
≤ 0,003 |
° |
|||||
|
Статичный параллелизм
|
≤ 0,08 |
мм | |||||
|
Осевое биение
|
≤ 36 |
≤ 40 |
мкм | ||||
|
Радиальное биение
|
≤ 27 |
≤ 30 |
мкм | ||||
|
Электрические характеристики
|
|||||||
|
Тип двигателя; угол шага
|
двухфазный 57-шаговый; 1,8 |
двухфазный 57-шаговый; 1,8 |
° | ||||
|
Модель двигателя
|
42M-1.8D-C-10 |
57M-1.8D-C |
|||||
|
Ток
|
1,7 |
2,4 | А | ||||
|
Крутящий момент
|
0,42 | 1 | Н⋅м | ||||
|
Модель решетчатой линейки
|
LAMOTION |
||||||
|
Модель двигателя (опционально)
|
Moons, SR2 |
Moons, SR4 |
|||||
|
Тип интерфейса
|
DB9 | ||||||
|
Тип кабеля
|
Кабель с высокой гибкостью (Helukabel, Германия) | ||||||
|
Длина кабеля
|
0,2 | м | |||||
|
Датчики ограничения положения
|
внешние опционально | ||||||
|
Датчики исходной точки
|
1×PM-L25(SUNX, Japan) | ||||||
|
Питание
|
DC 5 – 24 ± 10% | В | |||||
|
Потребление тока
|
≤ 15 |
А | |||||
|
Управляющий выход
|
Выход NPN с открытым коллектором DC 5 –24 В 50 мА или менее |
||||||
|
Состояние выходных портов
|
Порт включен, когда датчик заблокирован | ||||||
|
Нагрузка
|
|||||||
|
Горизонтальное направление
|
20 | 40 | кг | ||||
|
Перевернутое направление
|
5 | 10 | кг | ||||
|
Вертикальное направление
|
5 | 10 | кг | ||||
|
*Максимальная скорость измеряется в режиме нулевой нагрузки при частоте вращения двигателя 600 об/мин.
|
|||||||
- Научные исследования.
- Оптическая связь.
- Лазерные системы.
- Биомедицинские исследования.
- Сканирование поверхностей.
- Высокоточная фотоника.
- Высокоточное позиционирование в производственных сферах.
| Код серии | Диаметр столика |
Положение датчиков |
Производитель |
|---|---|---|---|
| TBRU |
100: Ø102 мм 200: Ø196 мм |
Не указывается (по умолчанию): встроенный SSxx: снаружи, xx: угловой диапазон |
EV |






